Working at sea is always dangerous and requires experience and caution, but offshore activities, and often onshore activities, have to be carried out no matter how bad the weather can be. Close to the coast, the effects of large waves and swell are less visible, but in the middle of the sea, it can be a different story. The amplitude can be variable even if the frequency does not vary that much. Add the waves induced by wind activity to the swell and the wave pattern gets pretty interesting.

Why should we concern ourselves with waves, no matter big or small? The boats can handle them, right? Well, if the ship in question is trying to gently lay a heavy piece of equipment on the bottom of the sea, or on another floating vessel, this could be problematic and very costly.
The consequences of not managing the movement of the ship at the water surface can be huge: loss of life, high pollution, loss of expensive equipment, and deadlines missed. In short, the usual big and small catastrophes.
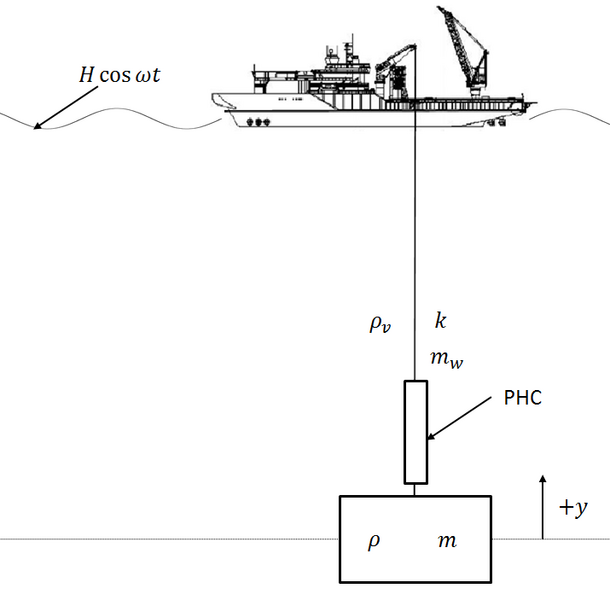
This problem is managed today by using very sophisticated winches and responsive onboard electrical or hydraulic equipment. Welcome to the world of Active Heave Compensation!
The hydraulic equipment uses high-pressure pipes, hoses, and hydraulic jacks or motors depending on the design solution, and all of these are connected with heavy-duty hydraulic couplings. Hydraulics work very well - they are responsive, very capable, and can last years, but not without a very high degree of maintenance.
Hydraulics systems are also especially difficult to troubleshoot small leaks to high-pressure hose or pipe bursts. The fault detection systems are unreliable and risks are high. The hydraulic fluid itself is a problematic pollutant. Hydraulics have become a very expensive solution for active heave compensation systems, even if they were a legacy solution.
Electrical solutions replacing hydraulics
Electrical solutions, either comprising some hydraulics or none at all, are becoming the norm. The use of flywheels and batteries to manage the peaks of power necessary to follow the oscillatory movement is common. Flywheels have an excellent response time to provide power and can take care of peak electrical loads, but they have drawbacks too: They require heavy maintenance, though this is now partially mitigated by using magnetic levitation bearings in a vacuum. However, the vacuum pumps still need regular maintenance.
From a safety aspect, flywheels are high on the list of hazards at sea. The wheel or rotor has a high moment of inertia and generates gyroscopic loads that can be very high. Some of these wheels can rev up to 40,000 RPM in a vacuum. The speed is so high that the wheel shape can ovalize. If for some reason the wheel comes loose, its captive inertial energy can incur serious damage.
On terra firma, the gyroscopic effect does not need to be taken into account, but on a moving vehicle, e.g. a crane ship, flywheels-induced loads need to be included in the assessment of the ship's stability.
Batteries have also been used to power active heave compensation systems, but due to their low number of cycles per lifetime, batteries, even if they are very oversized, have a relatively short lifetime. Active heave compensation applications, battery lifetime rarely exceeds a few months.The battery pack sizes become unmanageable because of the power density required to perform the heave compensation function.
The active heave compensation systems of the future needs to include supercapacitors - but why?
Because supercapacitors are almost maintenance-free and can withstand at more than million cycles, which guarantees a lifetime of 20+ years for the powering system. Their fast response, high power density, and low internal resistance ensure that they will provide the level of power required for the heave compensation system with minimum heat generation and power losses.
The cost of implementing supercapacitors will also be less than for the implementation of batteries or flywheels because the pack size will be much smaller and not add gyroscopic loads. Supercapacitors modules would be very much a "fit and forget" solution.